1. 项目介绍
宇树 Go2 机器狗的一套巡检程序。原来只能做基础运动(前进后退、趴下站起),手机 App 就能控。现在加了一层,让它能干三件正经事:
- 自主建图导航 — 走一遍就能把环境扫成地图,之后可以沿着设定路线自动巡逻
- 远程运动控制 — 不限于基础运动,还能切步态(灵动模式、跑步、避障等)
- 拍照回传 + 实时视频 — 拍的照片自动存到远端存储,摄像头画面实时推流
整个通信链路长这样:
你的手机/电脑
│
▼ MQTT 指令
jiaoyujidi.work:1883
│
▼
巡检程序 (跑在机器狗上)
│
├─→ DDS → 机器狗运动控制
├─→ MinIO → 照片存档
└─→ RTMP → 视频流配合后端存储(MinIO)和视频推流(RTMP),基本凑齐了一套远程巡检系统的骨架。
2. 怎么跟它说话 — MQTT 接口协议
整个系统的通信走 MQTT,一台公网 broker 做中转。
基础信息
| 项目 | 值 |
|---|---|
| MQTT 服务器 | jiaoyujidi.work:1883 |
| 指令发送 Topic | thing/product/device_01/services |
| 指令回复 Topic | thing/product/device_01/services_reply |
| 事件上报 Topic | thing/product/device_01/events |
| 状态上报 Topic | thing/product/device_01/osd |
| Client ID | robot_dog |
指令格式
发一条指令就是往 services topic 丢一段 JSON:
{"method": "方法名", "data": {参数...}}机器狗处理完会往 services_reply topic 吐回复:
{"method": "方法名", "data": {"result": 0, "text": "操作成功描述"}}result 为 0 表示成功,-1 表示失败,其他值看具体场景。
有哪些功能
method 按功能分三大类。下面的括号里是方法名的简写形式,实际 MQTT 发送时运动控制类需要加 sport_control_ 前缀(如 damp → sport_control_damp),建图导航类需要加 slam_ 前缀(如 mapping_start → slam_mapping_start)。完整 method 列表见附录。
姿态与运动控制 — 让狗做动作。包括趴下放松(damp → sport_control_damp)、站起来(standup → sport_control_standup)、站稳(balancestand → sport_control_balancestand)、恢复站立(recoverystand)、趴下(standdown)、前后左右移动(move)、急停(stopmove)。还有步态切换:灵动模式(freewalk)、跑步(trotrun)、行走(staticwalk)、并腿跑(freebound)、避障(freeavoid)、跳跃(freejump)、节能续航(economicgait)等。
建图与导航 — 巡检核心功能。建图流程:开始建图(mapping_start → slam_mapping_start)→ 走动采集 → 结束建图并自动上传地图(mapping_end)。导航流程:加载地图和拓扑点(navigation_prepare → slam_navigation_prepare)→ 重定位(relocalization)→ 执行导航(navigation_execute),过程中可以暂停(pause)、恢复(resume)、停止(stop)。还支持采集当前位姿作为拓扑点(collect_node_edge → slam_collect_node_edge),可以保存到文件或清除。
其他 — 拍照(take_photo),拍完自动上传 MinIO。
标准操作流程
建图:
- 让狗站起来(balancestand 或 standup)
- 进入灵动模式(freewalk),方便遥控走动
- 开始建图(slam_mapping_start),给个任务 ID
- 控制狗在目标区域走动,SLAM 自动采集点云
- 结束建图(slam_mapping_end),地图自动保存并上传 MinIO
导航:
- 让狗站起来
- 加载之前建好的地图和拓扑点(slam_navigation_prepare)
- 重定位(slam_relocalization),让狗知道自己在哪
- 执行导航(slam_navigation_execute),狗按拓扑路线走
- 走完或需要中断就停止(slam_navigation_stop)
3. 调试踩坑
上面这套协议在纸上看起来很完美,但实际部署到机器狗上跑起来的时候,各种问题就冒出来了。下面是在调试过程中踩过的几个典型坑。
3.1 坑 1:SLAM 脚本启动 0.5 秒就挂了
第一次跑程序的时候,日志显示 slam_script 的进程刚启动就被杀了:
[ScriptManager] Script 'slam_script' started with PID 5236
[ScriptManager] Script 'slam_script' (PID 5236) kiiled with status 0中间隔了不到半秒。lidar_script 倒是好好的。
排查时直接跑 unitree_slam 看了一下,发现它崩溃在日志目录的权限上。程序启动后想写 /unitree/module/unitree_slam/bin/logs/slam_server/,但那个目录权限不够,std::filesystem::filesystem_error 抛异常,直接 SIGABRT 了。
修起来倒是简单,到机器狗上跑一行:
sudo chmod -R 777 /unitree/module/unitree_slam/bin/logs/再启动就正常了。
3.2 坑 2:让狗站起来失败了
测试运动控制的时候发了 balancestand,返回了:
{"data":{"result":-1,"text":"平衡站立失败"},"method":"sport_control_balancestand"}想了半天,狗当时处于 Damp(趴下放松)状态,四条腿完全松弛贴地。这个状态下直接调 BalanceStand 是不行的——BalanceStand 是在已站立姿态下调整平衡,而不是从趴着直接站起来。
正确的顺序是:
Damp (趴下) → StandUp (先站起来) → BalanceStand (再站稳)先发 standup 让狗站起来,然后再发 balancestand 调整姿态,就成功了。
3.3 彩蛋
代码里把 “killed” 拼成了 “kiiled”。不影响功能,但每次看到日志都得多看一眼。
4. 现场实况
调试环境的具体网络拓扑如下。机器狗通过有线网口连接到开发机所在局域网,外网服务(MQTT Broker、MinIO、RTMP)则通过公网 IP 访问。
局域网设备:
| 设备 | IP 地址 |
|---|---|
| 开发机 (PC) | 192.168.123.29 |
| 机器狗板载电脑 (eth0) | 192.168.123.18 |
| 机器狗板载电脑 (默认) | 192.168.123.161 |
从开发机 ping 机器狗延迟大概 1.4ms,SSH 直连没问题。
外网服务:
| 服务 | 地址 | 用途 |
|---|---|---|
| MQTT Broker | jiaoyujidi.work:1883 | 指令中转 |
| MinIO | 112.6.203.2:446 | 照片、地图文件存储 |
| RTMP 服务器 | 27.223.85.130:3519 | 视频推流 |
机器狗通过板载电脑的 eth0 网口连接到局域网,配置文件里指定了 networkInterface: eth0。
5. 无线网络配置
有线连接虽然稳定,但机器狗巡检时需要自由走动,拖着网线不现实。这一节记录如何给 Go2 配置 Wi-Fi,让它通过无线网络连接到 MQTT Broker 和外网服务。
5.1 前置准备:修改路由器网段
Go2 机器狗内部有一个硬编码的局域网 192.168.123.x(板载电脑 192.168.123.18,MCU 192.168.123.161)。如果外接路由器的 LAN 也恰好是 192.168.123.x 网段,就会和机器狗内部网络冲突,导致路由混乱。
第一步:登录路由器后台,把路由器 LAN 口 IP 从默认的 192.168.123.1 改为其他网段,比如 192.168.6.1(子网掩码 255.255.255.0)。修改后路由器重启,DHCP 分配的 IP 就变成 192.168.6.xxx 了,彻底避开 192.168.123.x。
5.2 连接外设,进 Ubuntu 桌面
机器狗上没有预装无线网卡,需要外接 USB 无线网卡。操作步骤:
- 接外设:给机器狗板载电脑接上显示器(HDMI)、键盘和鼠标(USB)
- 插无线网卡:将 USB 无线网卡插入机器狗的 USB 口
- 开机进 Ubuntu:机器狗启动后进入板载电脑的 Ubuntu 桌面环境
5.3 手动连接 Wi-Fi
在 Ubuntu 桌面右上角点击网络图标,扫描并选择你的 Wi-Fi,输入密码连接。连接成功后 wlan0 通过 DHCP 获取 IP(如 192.168.6.6),和机器狗内部 LAN 的 192.168.123.x 处于两个独立网段。
5.4 调整路由优先级(关键步骤)
此时机器狗同时有两个网卡在线:
| 网卡 | 网段 | 用途 |
|---|---|---|
| eth0(内部总线) | 192.168.123.x | 与机器狗运动控制 MCU 通信(DDS) |
| wlan0(外接无线网卡) | 192.168.6.x | 连接外网,访问 MQTT Broker、MinIO、RTMP |
问题在于:Ubuntu 默认会把 eth0(192.168.123.x)的路由优先级设为最高,导致外网请求走错网卡,无法访问 MQTT Broker。
核心原则:外网流量优先走 wlan0,机器狗内部 DDS 通信走 eth0。通过调整路由 metric 实现——metric 越低,优先级越高。
先用 route -n 查看当前路由表:
route -n可以看到两条默认路由,eth0 的 metric 通常比 wlan0 低(优先走 eth0)。需要把 wlan0 的优先级调高。
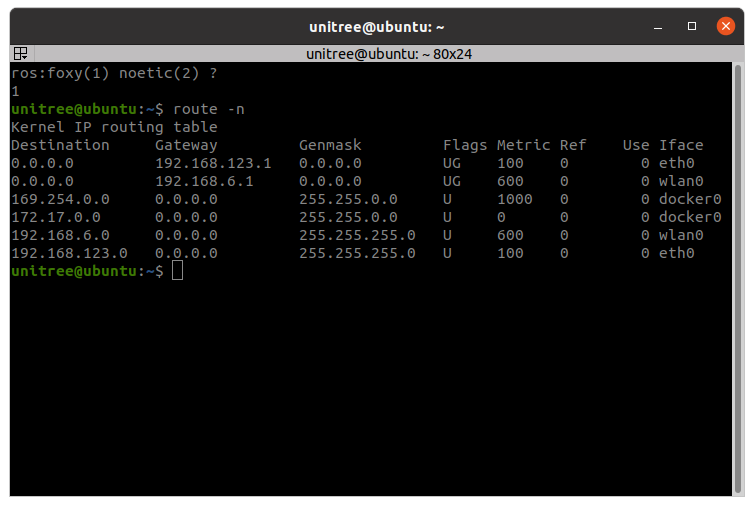
安装 ifmetric 工具并设置 wlan0 的 metric:
sudo apt install ifmetric
sudo ifmetric wlan0 90wlan0 metric 设为 90 后,它的优先级就高于默认的 eth0(通常 metric 为 100),外网流量会自动走 wlan0。
验证调整结果:
route -n
# 确认 wlan0 的 metric < eth0 的 metric
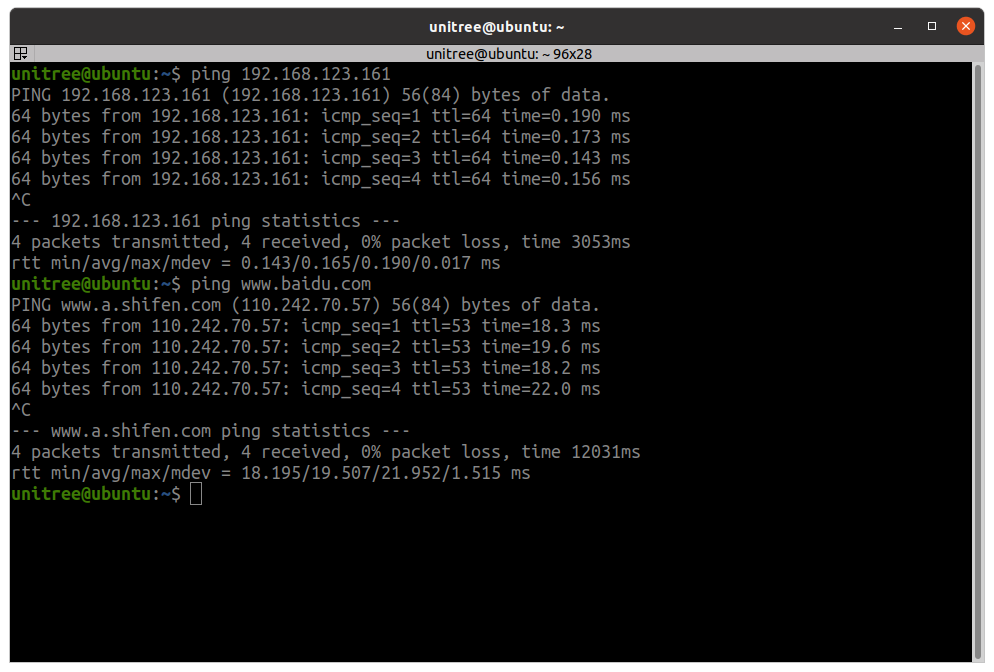
5.5 连通性验证
分别验证内网和外网都能通:
# 内网:ping 机器狗 MCU
ping 192.168.123.161
# 外网:ping 公网 MQTT Broker
ping jiaoyujidi.work两者同时通即表示配置成功——内网 DDS 通信走 eth0,外网 MQTT/MinIO/RTMP 走 wlan0,互不干扰。
最后测试 MQTT 连接:
mosquitto_pub -h jiaoyujidi.work -p 1883 \
-t "thing/product/device_01/services" \
-m '{"method":"test","data":{}}'收到回复就说明整条链路打通了:机器狗 → Wi-Fi → 路由器 → 公网 → MQTT Broker。
6. Patrol 巡检程序代码解析
前面的内容讲的是「怎么用」,这一节说清楚巡检程序本身的架构——代码怎么写、模块怎么组织、怎么跑起来。文中的 MQTT 话题和指令格式已在 第 2 节 中详细定义。
6.1 技术栈与项目结构
巡检程序用 C++(Qt5) 编写,基于 Unitree SDK2 和 paho-mqtt-cpp,CMake 构建。项目位于机器狗板载电脑的 ~/arm/ 目录下:
arm/
├── CMakeLists.txt # CMake 构建配置
├── run.sh # 启动脚本
├── config/
│ └── config.yaml # 配置文件(MQTT、MinIO、RTMP、网卡)
├── 3rdparty/ # 第三方库(DDS、MQTT、AWS SDK)
├── src/
│ ├── main.cpp # 入口:Qt Application
│ ├── LogicControl/ # 主控逻辑:加载配置、初始化各模块、连接信号槽
│ ├── Mqtt/ # MQTT 客户端(paho-mqtt-cpp async_client)
│ ├── Go2Control/ # 指令分发中枢
│ ├── Minio/ # MinIO 上传工具(AWS SDK S3)
│ └── Core/
│ ├── motion/ # 运动控制(封装 Unitree SportClient)
│ ├── slam_core/ # SLAM 底层通信(DDS 订阅 slam_info)
│ ├── nav_lifecycle/ # 建图/导航流程管理 + ScriptManager
│ ├── nav_handler/ # 导航执行与重定位
│ ├── media_sender/ # 拍照上传(ImageUploader)+ RTMP 推流(VideoStreamManager)
│ ├── status_watch/ # 状态监控(LowState/SportMode/BMS/Lidar)
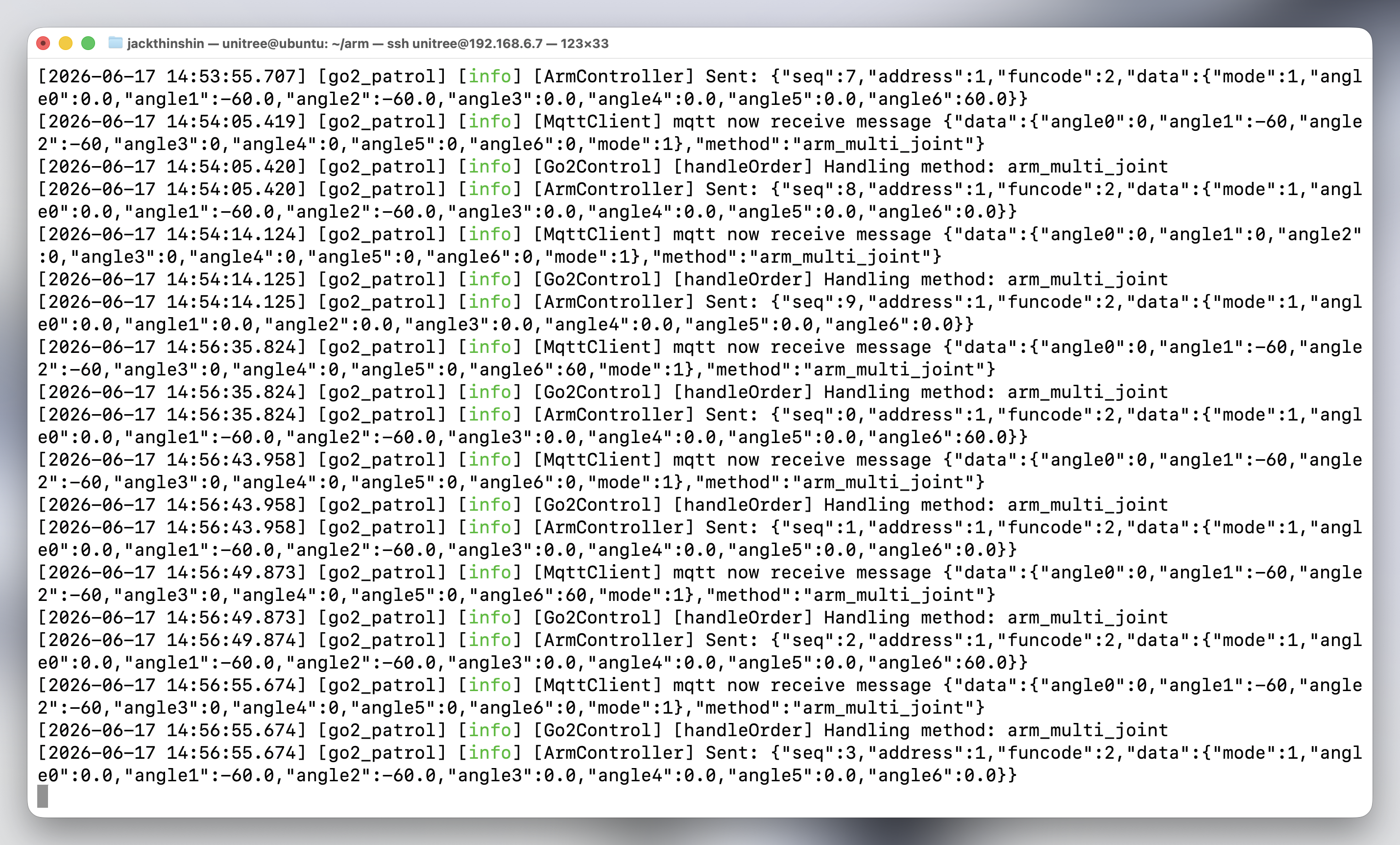
│ ├── arm_controller/ # 机械臂控制
│ └── utils/ # 工具函数
└── build/ # 编译输出第三方依赖:Unitree SDK2(DDS 运动控制)、paho-mqtt-cpp(MQTT)、AWS SDK C++(MinIO S3)、GStreamer(RTMP 推流)、nlohmann/json、yaml-cpp、spdlog(日志)、Qt5。
6.2 架构概览
整个程序围绕 Qt 信号槽机制组织,核心流程:
MQTT Broker
│ 指令(json) publish 到 services topic
▼
MqttClient (mqtt_callback) ← paho-mqtt-cpp async_client
│ 收到消息 → emit receiveOrder(json)
▼
Go2Control :: handleOrder() ← 指令分发中枢
│
├─ sport_control_* ──→ MotionController ──→ Unitree SportClient (DDS)
├─ slam_* ──→ slamLifecycle ──→ ScriptManager (fork/exec SLAM脚本)
├─ take_photo ──→ ImageUploader ──→ VideoClient 拍照 → MinIO 上传
└─ arm_* ──→ ArmController ──→ 机械臂 DDS 指令
│
publish_message(json) → MQTT services_reply另外两条独立线程:
- VideoStreamManager(单例)— GStreamer 管道,摄像头 RTMP 推流,后台常驻
- customStatus — 订阅 DDS 频道(
rt/sportmodestate、rt/lowstate、rt/utlidar/lidar_state),定期上报 OSD 状态和事件到 MQTT
6.3 关键模块说明
LogicControl — 主控入口。main.cpp 中创建 Qt Application,初始化 InitSetting(日志系统),然后创建 LogicControl 实例。LogicControl 加载 config.yaml,创建 MQTT 客户端、Go2Control、customStatus,通过 init_connections() 串联所有信号槽。
MotionController — 封装 Unitree SDK2 的 SportClient,每个 MQTT 指令对应一个方法:sport_control_damp()、sport_control_move(data)、sport_control_freewalk() 等,直接通过 DDS 下发到机器狗运控系统。
ScriptManager(单例)— SLAM 脚本的进程管理器。通过 fork() + execv() 启动宇树的 unitree_slam 和 mid360_driver 二进制程序,用 waitpid() 监控子进程退出状态。支持三种输出模式:终端输出、文件日志(~/arm/log/)、静默。建图开始 → startScript("slam_script", ...);建图结束 → stopScript("slam_script"),底层 kill(-pid, SIGTERM) 终止进程组。这就是第 3 节踩坑 1 中 slam_script 的管理机制。
minioTools — 基于 AWS SDK C++ 的 S3 客户端,负责拍照后的图片上传以及建图完成后的 PCD 地图文件上传/下载。
6.4 编译与运行
# 安装依赖(首次)
sudo apt install qt5-default qtcreator nlohmann-json3-dev libyaml-cpp-dev \
libcurl4-openssl-dev libgstreamer1.0-dev libgstreamer-plugins-base1.0-dev \
gstreamer1.0-plugins-base gstreamer1.0-plugins-good gstreamer1.0-plugins-bad
# 编译
cd ~/arm/build
cmake ..
make -j8
# 运行(无桌面环境,-platform minimal)
cd ~/arm
bash run.shrun.sh 只有两行:export QT_QPA_PLATFORM=minimal 然后启动 ./build/bin/unitree_go2_patrol。-platform minimal 让 Qt 不依赖图形环境,适合 SSH 远程运行。
7. Dashboard WebUI — 宇树 Go2 巡检控制台
命令行发 MQTT 指令只能调试用,真正用起来需要图形界面。我搭了一个 Web 控制台,跑在机器狗板载电脑上,局域网内任意设备打开浏览器就能控制。Dashboard 的指令全部通过 第 2 节 中定义的 MQTT 协议下发,相当于把附录里的每一条指令变成了可视化的按钮。
7.1 技术栈
| 层 | 技术 | 说明 |
|---|---|---|
| 后端 | FastAPI (Python) | REST API,uvicorn 运行,HTTP → MQTT 翻译层 |
| 前端 | 原生 HTML/CSS/JS | 单页应用,GitHub 暗色主题 |
| 实时通信 | MQTT(paho-mqtt) | 后端维持 MQTT 长连接,前端轮询 REST API |
| 视频流 | RTMP → HLS | GStreamer 推 RTMP,后端提供 HLS 静态文件 |
| 部署 | 机器狗板载电脑 192.168.6.6:8900 | FastAPI 自托管静态文件 |
7.2 API 接口
后端提供以下 REST 端点(完整 OpenAPI 文档见 /docs):
| 端点 | 方法 | 说明 |
|---|---|---|
/api/command?method=...&data=... | POST | 发送 MQTT 指令到机器狗 |
/api/status | GET | 系统状态总览(MQTT 连接、HLS 状态等) |
/api/messages?limit=N | GET | 最近的 MQTT 回复和事件日志 |
/api/photos | GET | MinIO 照片列表 |
/api/photos/{key} | GET | MinIO 照片代理 |
/api/hls/start | GET | 启动/重启 HLS 视频流 |
/api/arm_status | GET | 机械臂关节角度(通过 MQTT OSD 回传) |
/api/config | GET | 当前配置(脱敏后) |
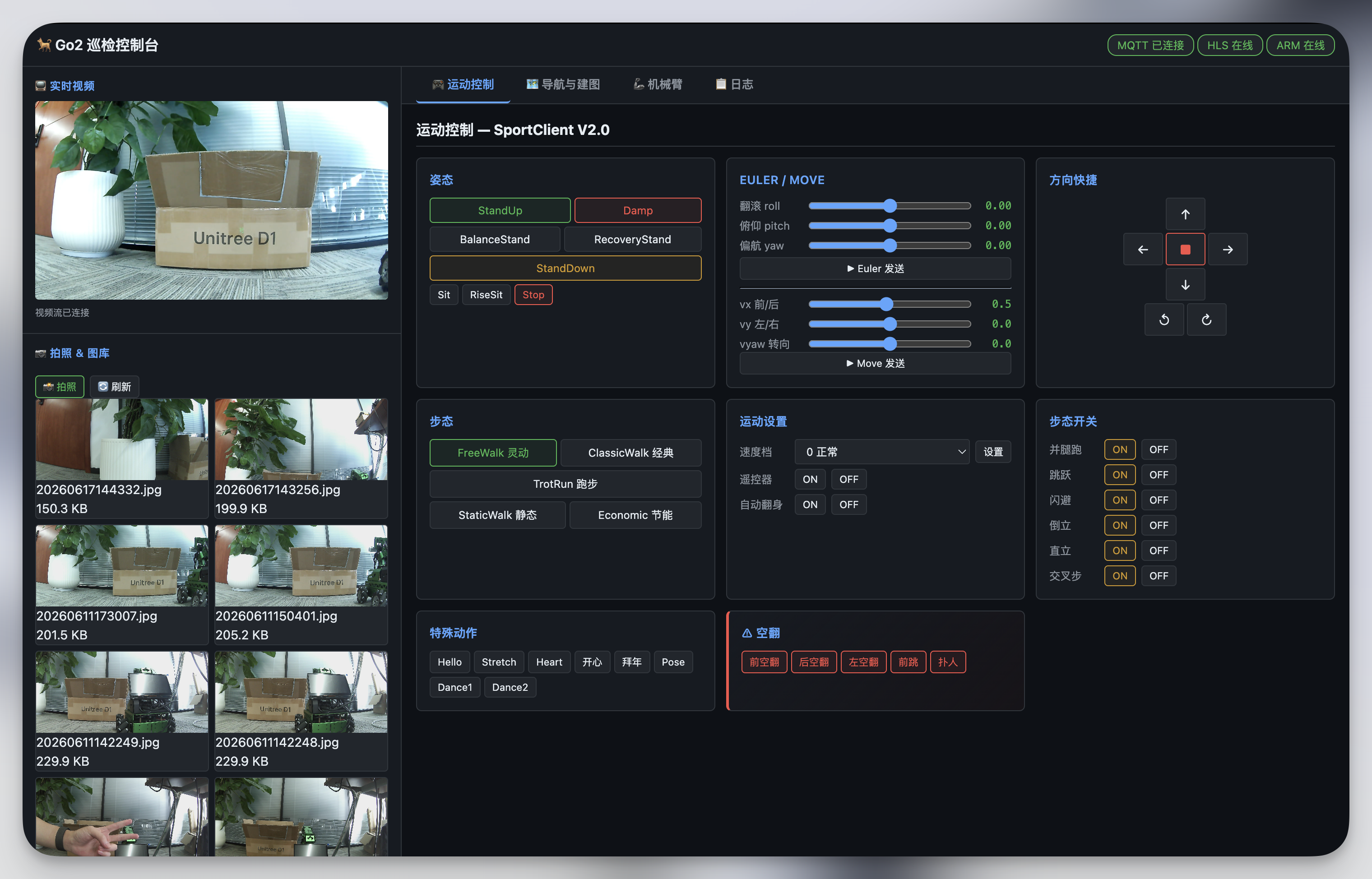
7.3 前端功能面板
控制台默认 GitHub 暗色主题,顶部状态栏显示 MQTT / HLS / ARM 三个连接指示灯,主区域四个 Tab:
① 视频 & 照片 — 左侧主面板。HLS 实时视频播放(<video> 标签),下方照片缩略图列表,点击放大查看。每 10 秒轮询 /api/photos 刷新。
② 运动控制 — 虚拟摇杆 + 速度滑块。拖动摇杆计算位移量,映射为 vx(前后)、vy(左右)、vyaw(转向)三个速度值。通过三个滑块精细调节。姿态按钮和步态切换按钮直接调用 /api/command。
③ 建图 & 导航 — 建图流程控制和导航状态面板。显示当前 SLAM 状态(空闲/建图中/导航中),发送停指令目标导航导航任务指令。
④ 日志 & 状态 — 最近 MQTT 消息日志(/api/messages),OSD 状态数据(电池、姿态、步态模式),机械臂角度实时反馈(每 2 秒轮询 /api/arm_status)。

7.4 架构要点
浏览器 (192.168.6.x)
│ fetch('/api/command?method=...')
▼
FastAPI (192.168.6.6:8900)
│ paho-mqtt publish
▼
MQTT Broker (jiaoyujidi.work:1883)
│ subscribe services topic
▼
Patrol 巡检程序 (C++ Qt, 同一台机器狗)
│ DDS → 机器狗运控前端是纯静态文件(HTML + CSS + JS),由 FastAPI 的 StaticFiles 托管。后端本质上是一个 HTTP → MQTT 的翻译网关:前端发 HTTP POST 请求,后端转成 MQTT 消息发布到 Broker;后端同时维持 MQTT 订阅,把收到的回复和事件缓存下来,供前端轮询。
7.5 启动方式
# 在机器狗板载电脑上
cd ~/arm/dashboard
uvicorn server:app --host 0.0.0.0 --port 8900然后局域网内任意设备浏览器访问 http://192.168.6.6:8900 就能打开控制台。配合前面配好的无线网络,手机或平板也能远程巡检。
8. 下一步
当前进度总结:
| 模块 | 状态 | 说明 |
|---|---|---|
| MQTT 指令协议 | ✅ 完成 | 三大类 20+ 条指令,覆盖运动/建图/导航/拍照 |
| SLAM 建图导航 | ✅ 完成 | 可建图、保存、加载、重定位、巡逻 |
| 无线网络配置 | ✅ 完成 | Wi-Fi 连接外网,双网卡分流 |
| Patrol 巡检程序 | ✅ 完成 | C++ Qt5 实现,MQTT+DDS 双通道 |
| Dashboard WebUI | ✅ 完成 | FastAPI + Vue 3,局域网浏览器控制 |
| 公网远程控制 | 🔜 待做 | 前端部署到公网,实现外网远程巡检 |
后面几个方向:
- Web 面板公网部署 — 目前 Dashboard 跑在机器狗局域网内(
192.168.6.6:8900),只能局域网访问。下一步把前端部署到 Vercel/Netlify 等公网平台,通过 FRP 内网穿透将机器狗的 FastAPI 后端暴露到公网,实现真正的远程巡检控制。 - 定时巡检 — 用 APScheduler 或 cron 在机器狗上设置定时任务,到点自动发导航指令,狗自己走一圈。走完自动拍照存档,生成巡检报告。
- 异常检测 — 配合摄像头和传感器数据,在巡逻过程中实时检测异常(如物品移位、区域入侵、温度异常等),触发自动拍照上传并告警通知。
- 多机协同 — 多台机器狗协同巡检大范围区域,通过 MQTT 共享位置信息避免碰撞,任务编排。
本质上,现在每一条命令行里敲的 MQTT 指令,以及 Dashboard 上的每一个按钮,都是在驱动这台机器狗从「遥控玩具」变成「自主巡检工具」。
附录:完整 MQTT 指令参考
以下所有 method 和参数结构均从项目源代码中提取。
A. 姿态控制
| method | data 参数 | 说明 |
|---|---|---|
sport_control_damp | {} | 阻尼模式,趴下放松 |
sport_control_balancestand | {} | 平衡站立(需先 standup) |
sport_control_recoverystand | {} | 从躺倒恢复站立 |
sport_control_standup | {} | 从坐/趴到站起来 |
sport_control_standdown | {} | 从站到趴下 |
B. 移动控制
| method | data 参数 | 说明 |
|---|---|---|
sport_control_move | {"vx":float, "vy":float, "vyaw":float} | 移动:前后(m/s)、左右(m/s)、转向(rad/s) |
sport_control_stopmove | {} | 急停 |
sport_control_speedlevel | {"level":int} | 设置速度等级 |
sport_control_switchjoystick | {"flag":bool} | 切换摇杆模式 |
C. 步态模式
| method | data 参数 | 说明 |
|---|---|---|
sport_control_freewalk | {} | 灵动/自由行走模式 |
sport_control_freebound | {"flag":bool} | 并腿跑 |
sport_control_freejump | {"flag":bool} | 跳跃模式 |
sport_control_freeavoid | {"flag":bool} | 避障模式 |
sport_control_autorecoverset | {"flag":bool} | 自动翻身 |
sport_control_classicwalk | {"flag":bool} | 经典步态 |
sport_control_trotrun | {} | 常规跑步 |
sport_control_staticwalk | {} | 常规行走 |
sport_control_economicgait | {} | 节能续航步态 |
D. SLAM 建图
| method | data 参数 | 说明 |
|---|---|---|
slam_mapping_start | {"slam_mapping_id":"string"} | 开始建图,ID 自定义 |
slam_mapping_end | {"slam_mapping_id":"string"} | 结束建图,自动上传 PCD 到 MinIO |
E. 拓扑点采集
| method | data 参数 | 说明 |
|---|---|---|
slam_collect_node_edge | {"slam_navigation_id":"","slam_mapping_id":"","slam_topo_id":"","mode":int,"speed":float} | 采集当前位姿为拓扑点 |
slam_save_node_edge | {"slam_mapping_id":"","slam_topo_id":""} | 保存拓扑点到文件并上传 MinIO |
slam_clear_node_edge | {} | 清除所有拓扑点 |
F. 导航
| method | data 参数 | 说明 |
|---|---|---|
slam_navigation_prepare | {"slam_navigation_id":"","slam_mapping_id":"","slam_topo_id":""} | 加载地图和拓扑点,可选参数 file 从 URL 下载 |
slam_relocalization | {"slam_navigation_id":""} | 基于已加载地图重定位 |
slam_navigation_execute | {"slam_navigation_id":""} | 执行导航 |
slam_navigation_pause | {"slam_navigation_id":""} | 暂停导航 |
slam_navigation_resume | {"slam_navigation_id":""} | 恢复导航 |
slam_navigation_stop | {"slam_navigation_id":""} | 停止导航(停止全部脚本) |
G. 其他
| method | data 参数 | 说明 |
|---|---|---|
take_photo | {} | 拍照并上传 MinIO |
test_startScript | {} | 测试脚本启动 |
test | {} | 测试上传 |
发送示例
用 mosquitto_pub 工具:
# 让狗站起来
mosquitto_pub -h jiaoyujidi.work -p 1883 \
-t "thing/product/device_01/services" \
-m '{"method":"sport_control_standup","data":{}}'
# 前进 0.3m/s
mosquitto_pub -h jiaoyujidi.work -p 1883 \
-t "thing/product/device_01/services" \
-m '{"method":"sport_control_move","data":{"vx":0.3,"vy":0,"vyaw":0}}'
# 拍照
mosquitto_pub -h jiaoyujidi.work -p 1883 \
-t "thing/product/device_01/services" \
-m '{"method":"take_photo","data":{}}'查看回复(另开一个终端):
mosquitto_sub -h jiaoyujidi.work -p 1883 \
-t "thing/product/device_01/services_reply"