主控型号:Jetson Orin NX
概述
本文档为 JetRover 小车在 Jetson Orin NX 主控下使用 ROS2 完成环境建图(SLAM)与自主导航(Nav2)的实验流程。内容覆盖启动前检查、网络与远程连接、手动建图、地图保存、单点与多点导航操作,以及常见问题与排查要点。
1. 前置准备与安全说明
- 电量与安全:小车前侧显示屏上有电池电压数据,在启动前确认电池电压 ≥ 10V;若低于 10V,扩展板蜂鸣器会提示“滴滴”,即为电量过低信号,此时请先充电以避免运行异常。
- 工作环境:建图与导航应在平整、封闭或半封闭的室内场地进行。若场内布置障碍物,障碍物高度应高于激光雷达水平线以确保可被扫描。
按下按键开机
2. 网络连接与远程桌面(NoMachine)
- 在触摸屏上进入 Ubuntu 桌面并配置 Wi‑Fi,使小车与控制电脑及手机处于同一局域网内。
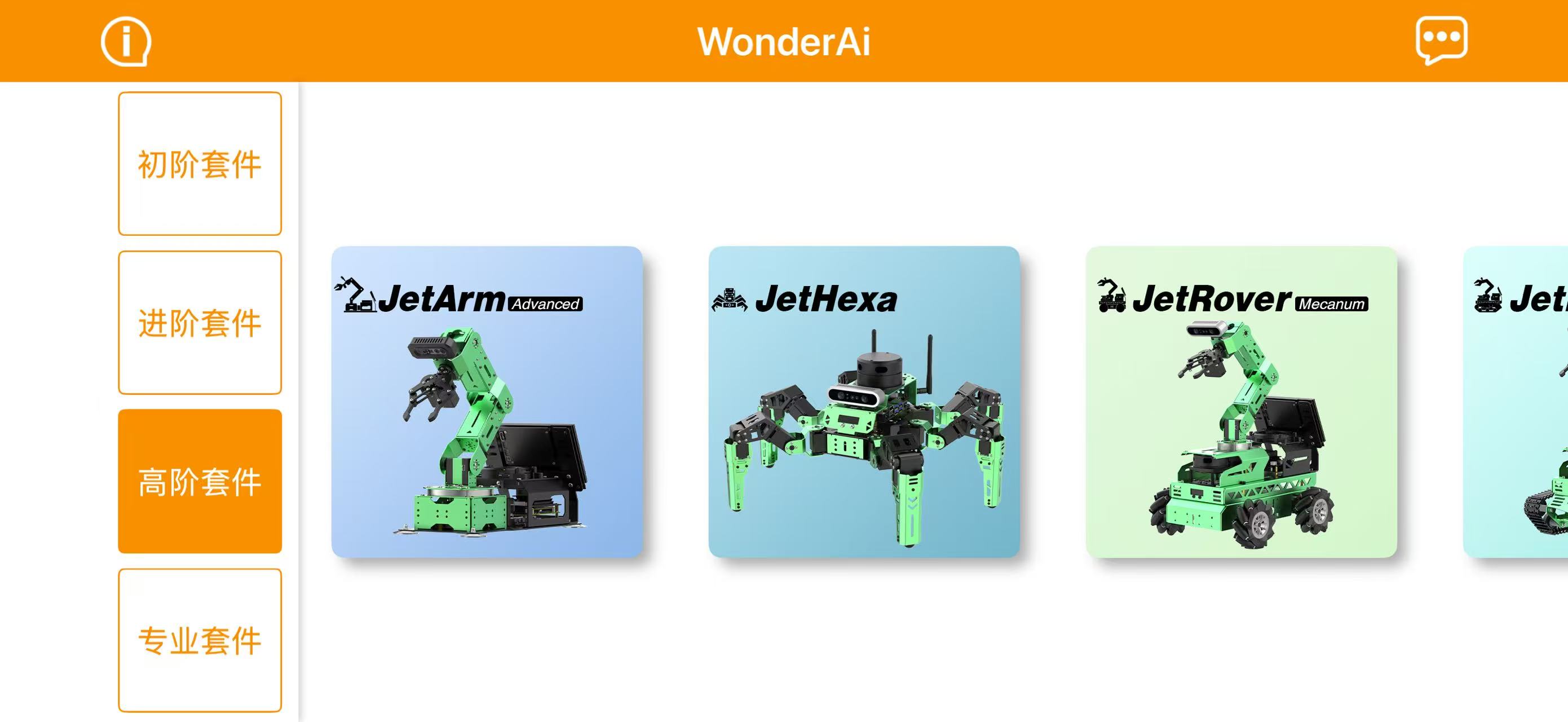
- 手机端(目的是获得小车主控的IP地址,也可以通过查看路由器管理页面信息更加轻松地获得):安装并打开 WonderAI 应用,选择正确的小车型号
JetRover Mecanum,长按设备图标可查看分配的 IP 地址与设备 ID,用于后续的远程连接。

- 使用 NoMachine 在电脑上连接小车主机:打开 NoMachine,在主界面输入刚才获得的小车 IP,选择
Configure connection to new host并添加。
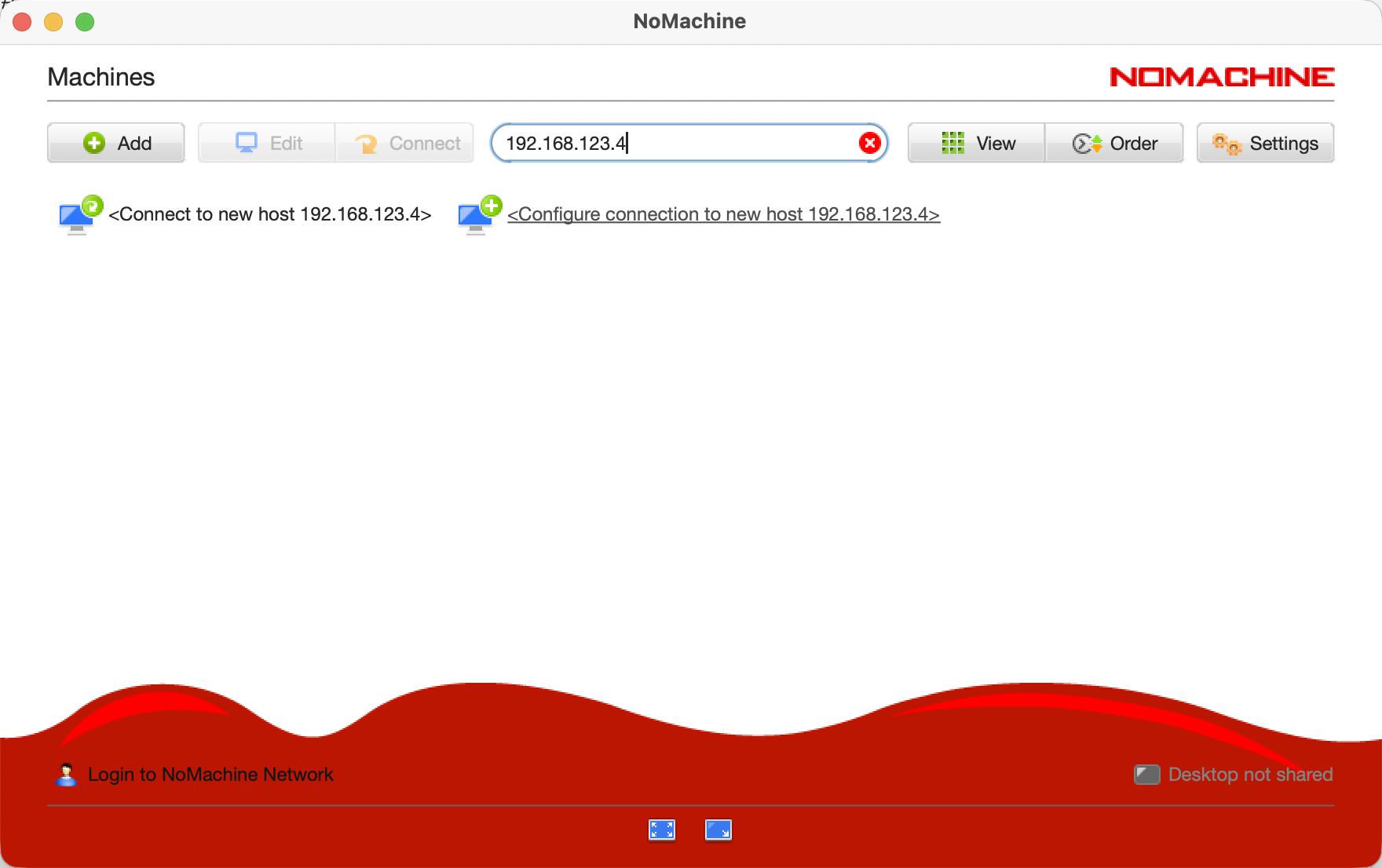
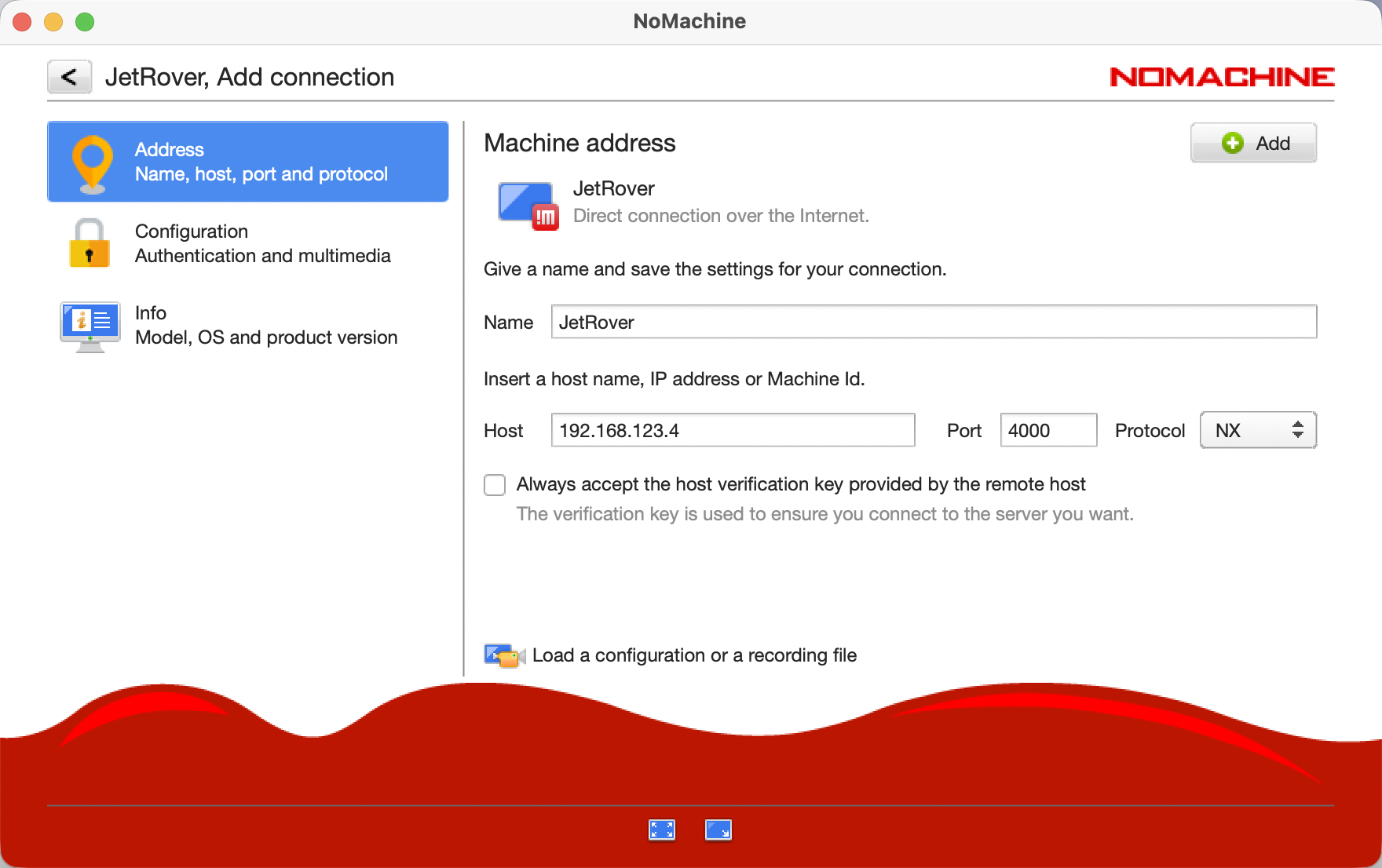
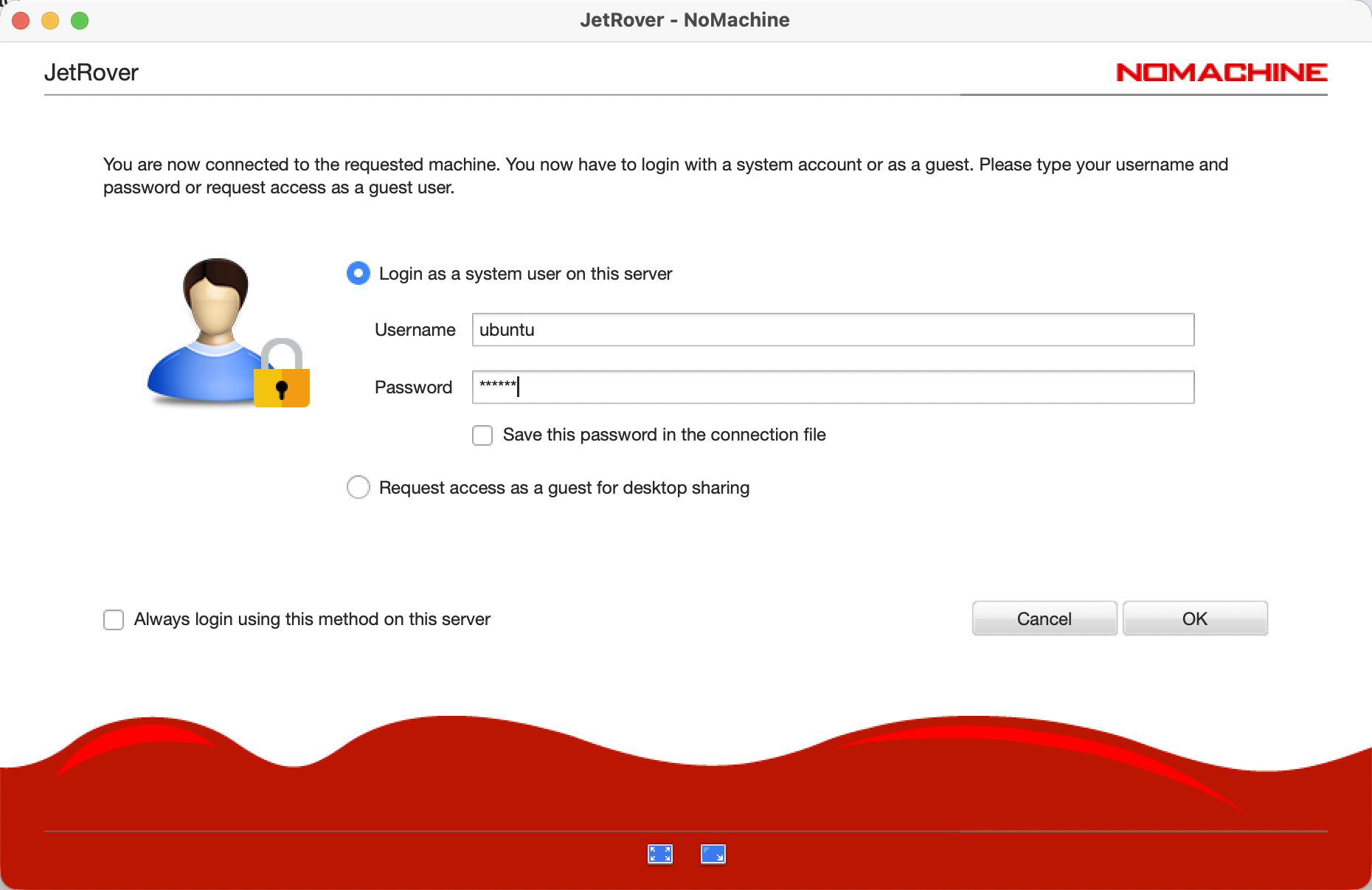
默认账号:用户名 ubuntu,密码 ubuntu。登录成功后可远程访问桌面。
3. 启动与工具检查
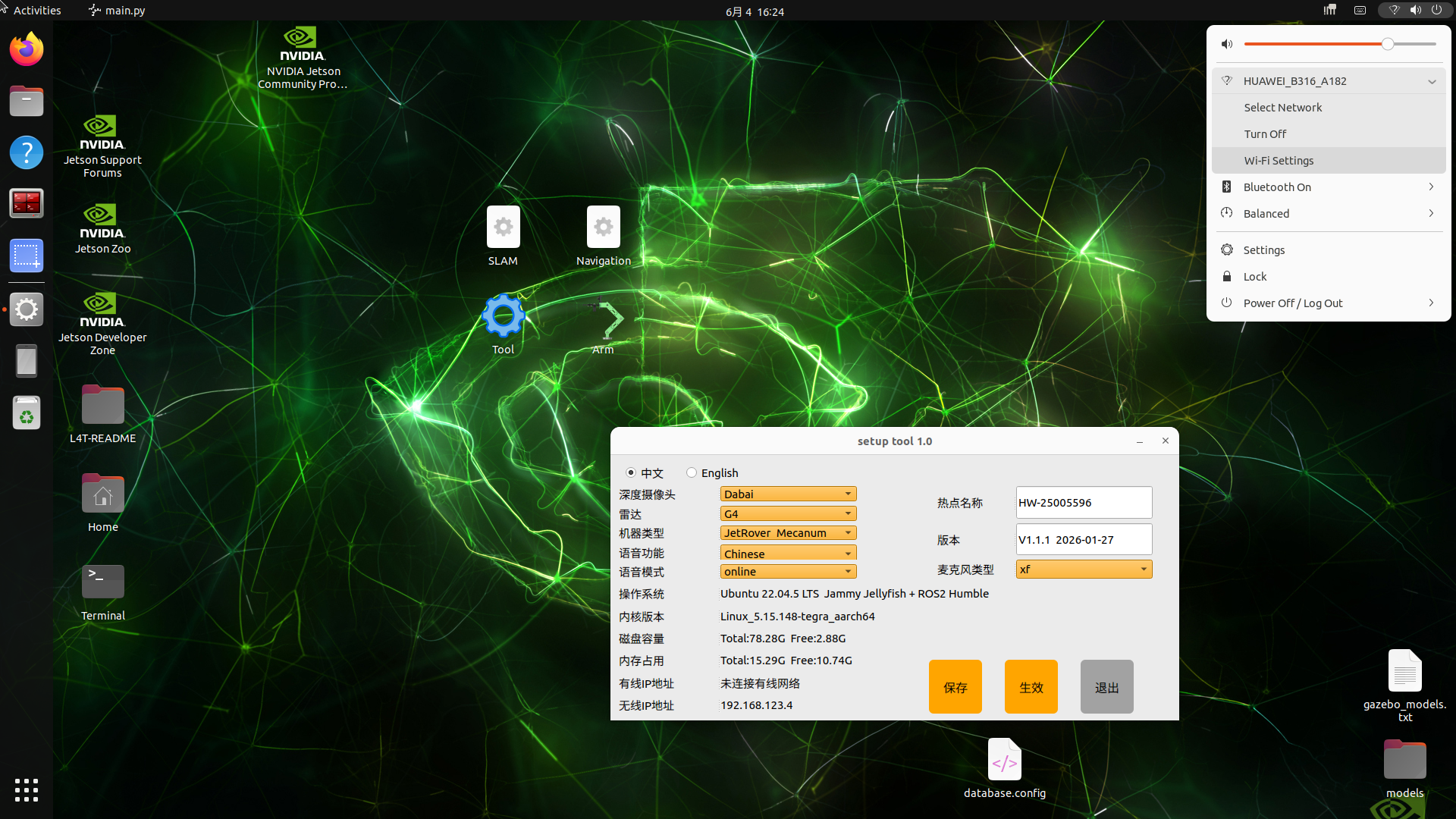
远程桌面上默认提供若干快捷程序:SLAM、Navigation、Tool、Arm。在开始建图/导航前,首先打开 Tool 检查传感器、雷达与系统配置是否正常。

注意确认以下信息是否与实际设备匹配!
- 深度摄像头:Dabai
- 雷达:G4
- 机器类型:Jetrover Mecanum
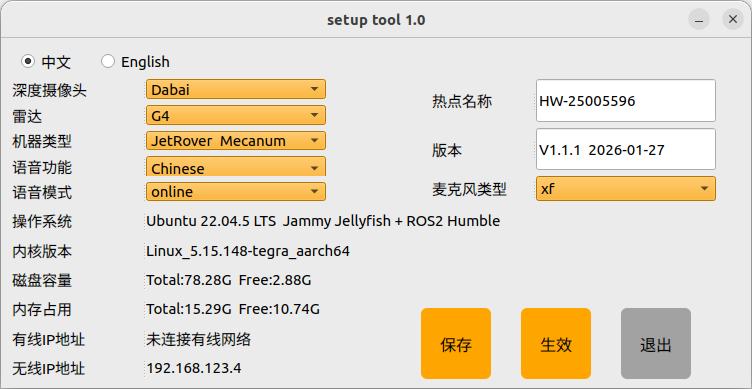
确认各项参数与驱动正常后,进入下一步建图流程。
4. 手动建图(SLAM)流程
流程要点:通过遥控器或键盘控制机器人在目标空间内均匀移动,采集足够的激光雷达数据,以生成完整、无缺失的二维栅格地图。
步骤:
- 将机器人放置于待建图区域内,开启
SLAM程序(双击桌面上的SLAM图标)。
-
程序启动后会打开多个终端窗口及 RViz 显示界面。若 RViz 无数据显示,先关闭所有 SLAM 程序窗口后重启
SLAM应用。 -
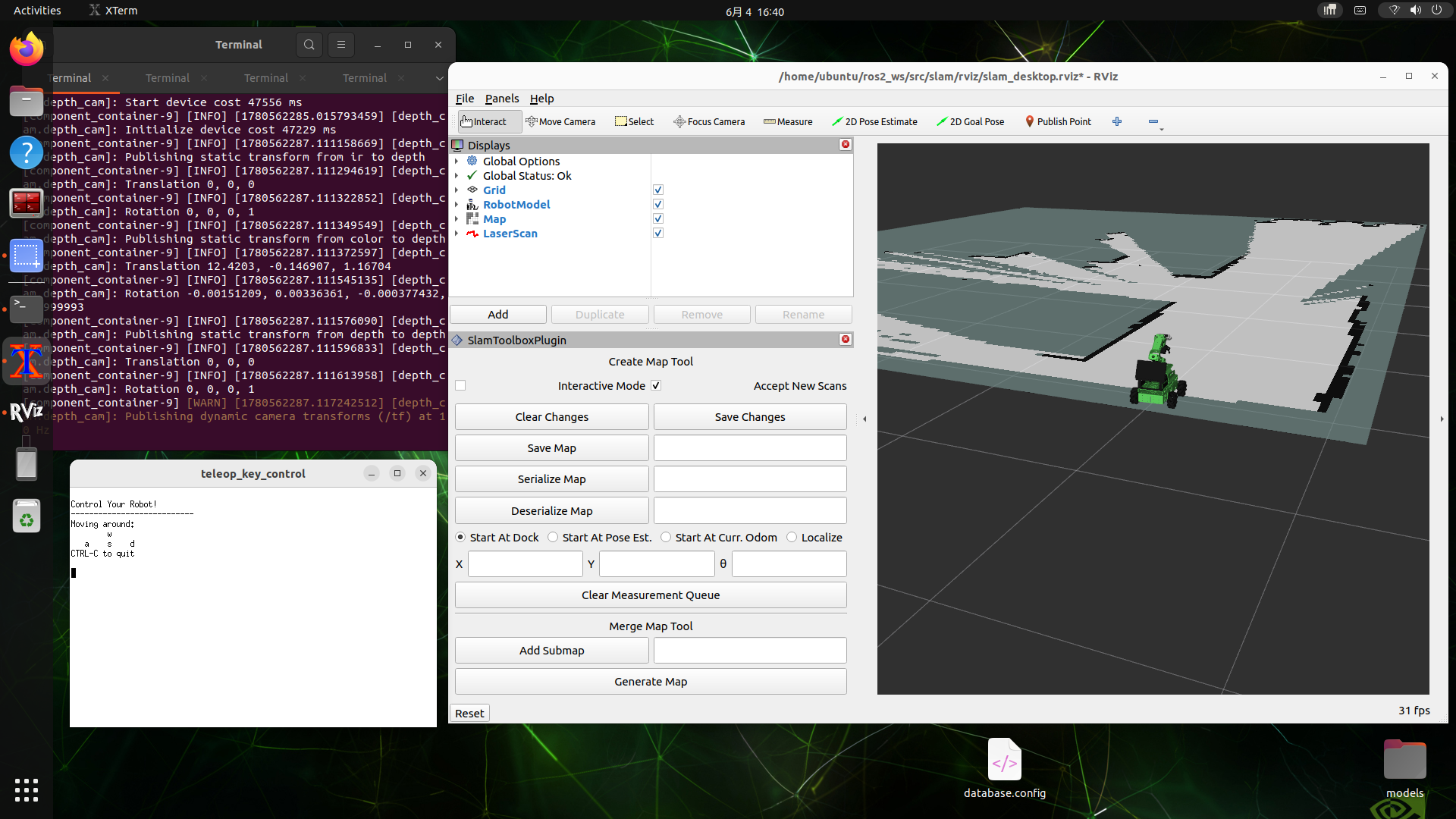
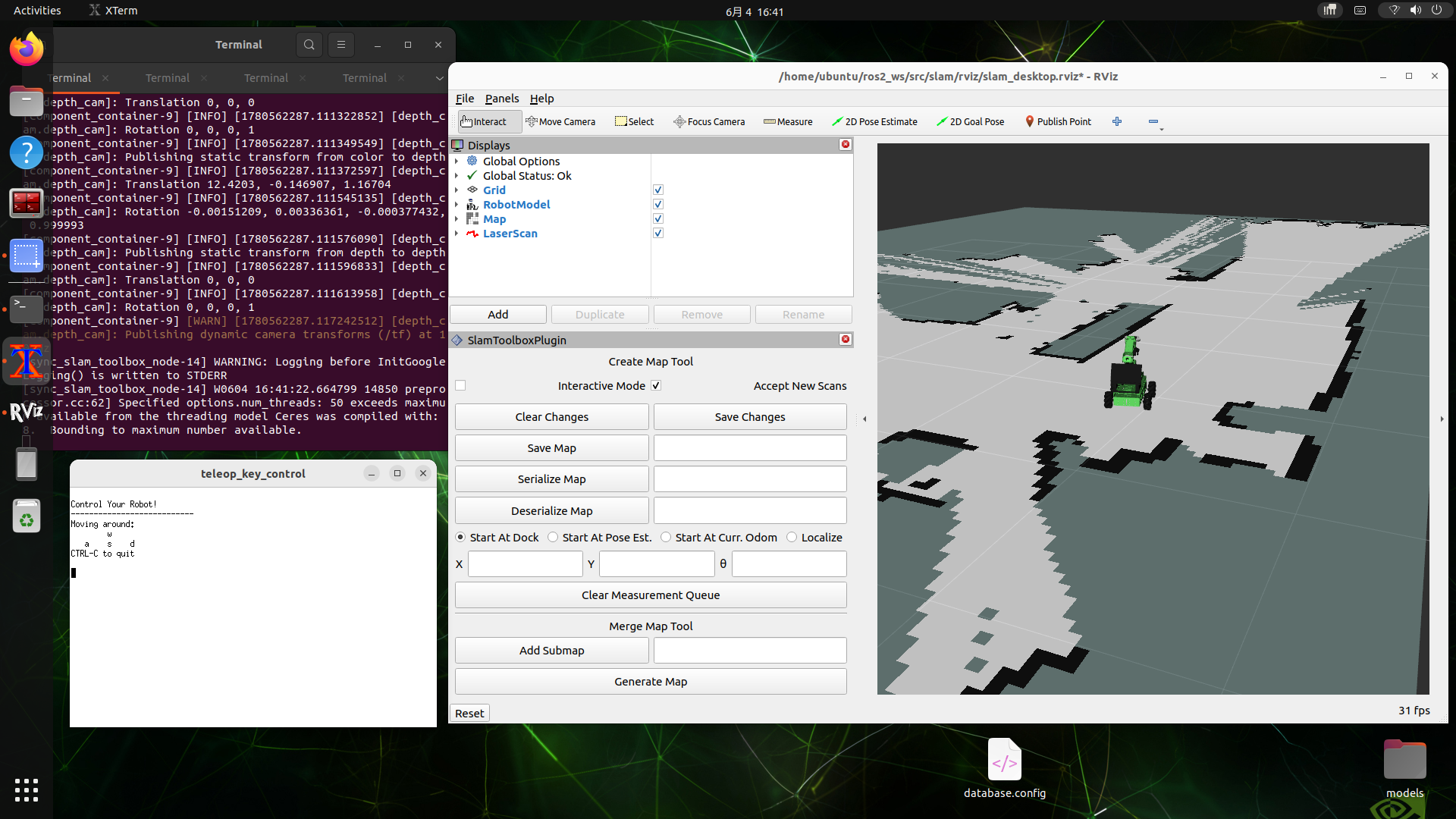
若显示信息正常,使用遥控器、手柄或远程桌面上的虚拟遥控器控制机器人运动以扫描场景信息:
- 按
W/S:持续前进/后退 - 按
A/D:中断直行并原地旋转(按键松开停止旋转)
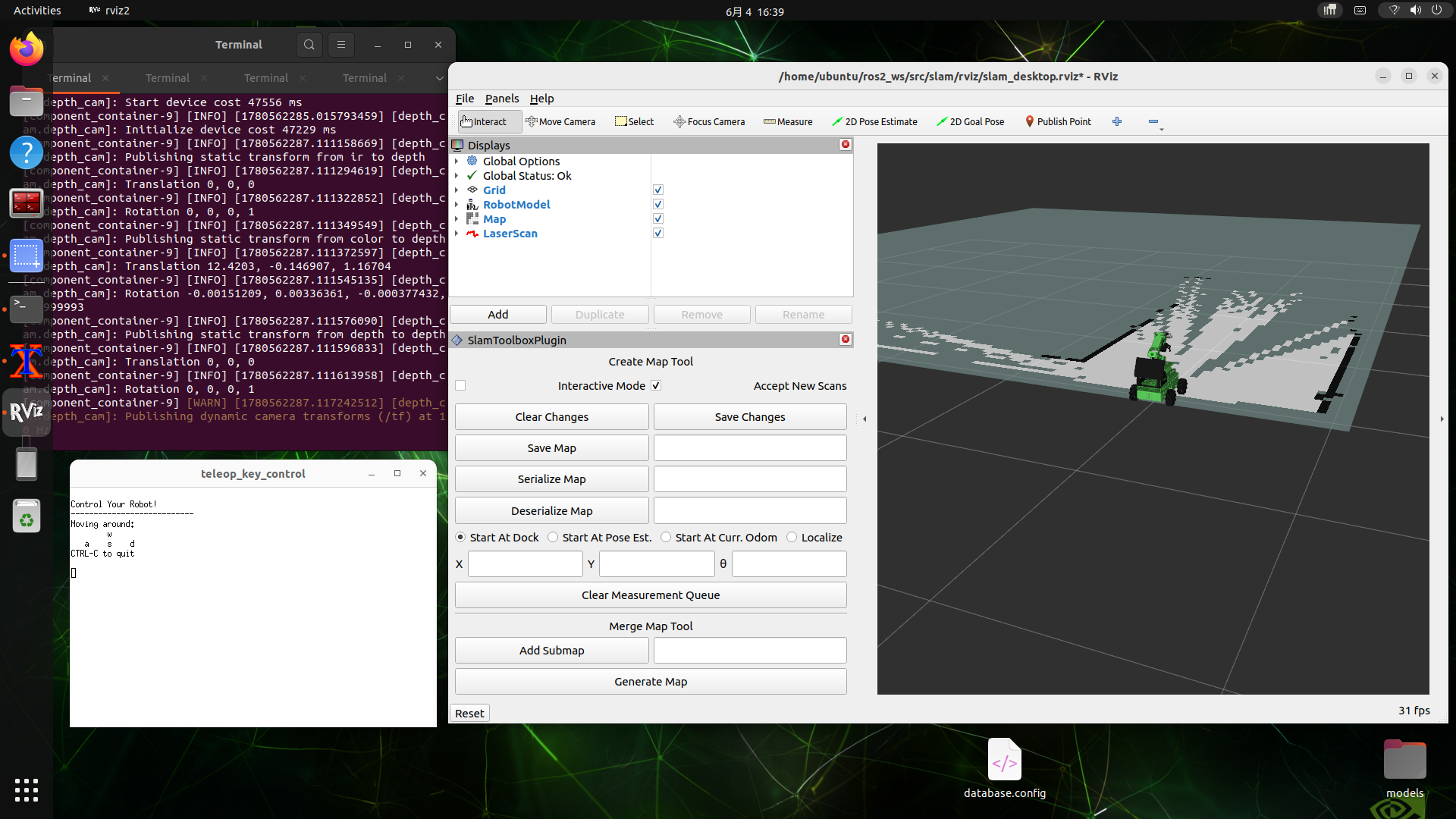
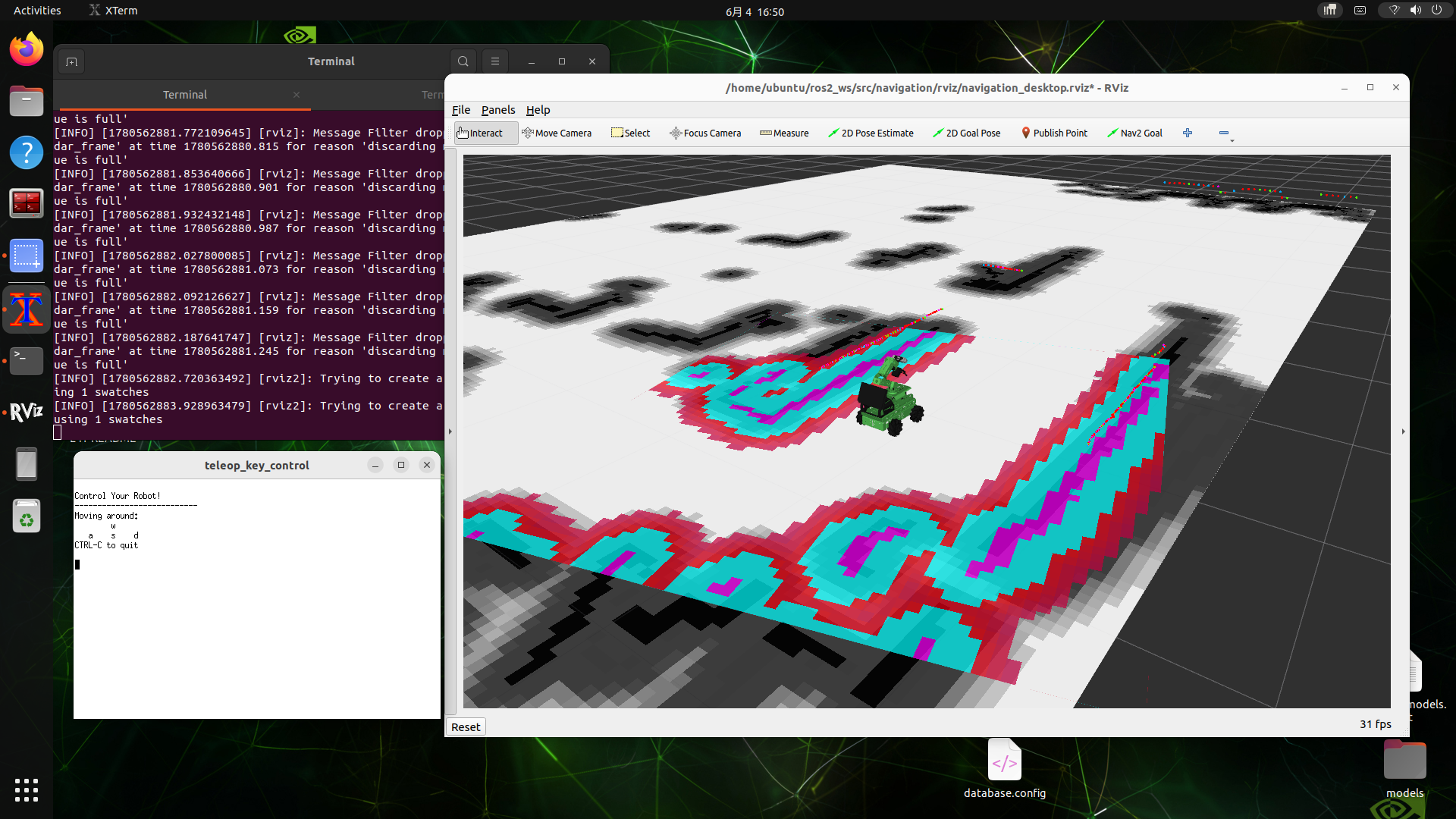
- 在移动过程中观察 RViz 的激光点云/里程计,确保环境扫描覆盖完整。建图时的界面示例如下:
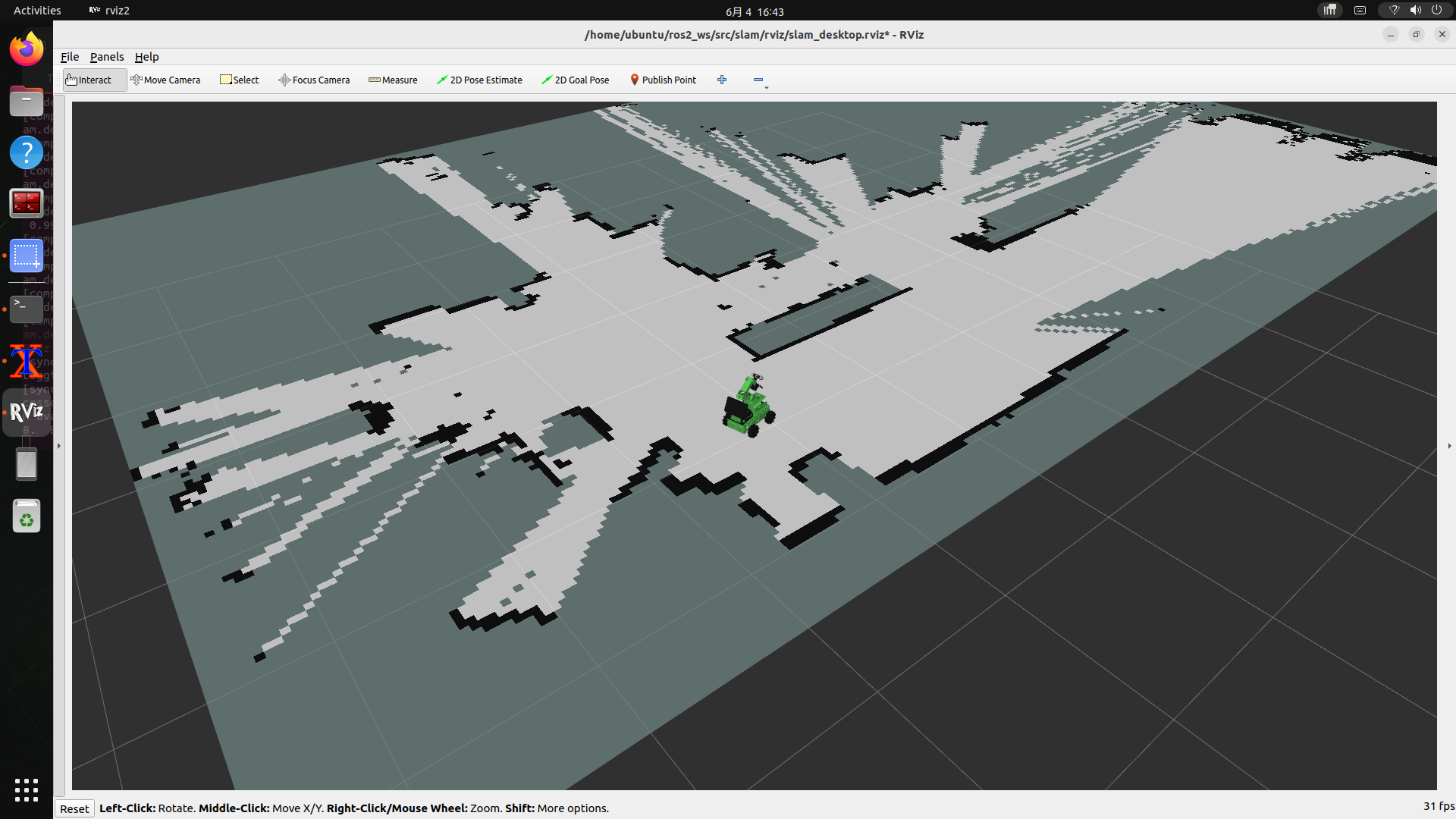
我们可以拖动鼠标调整视角,检查建图完成情况:
- 完成覆盖扫描后,在 RViz 中点击左侧的
Save Map或退出时选择保存,将当前生成的地图文件保存到默认路径。
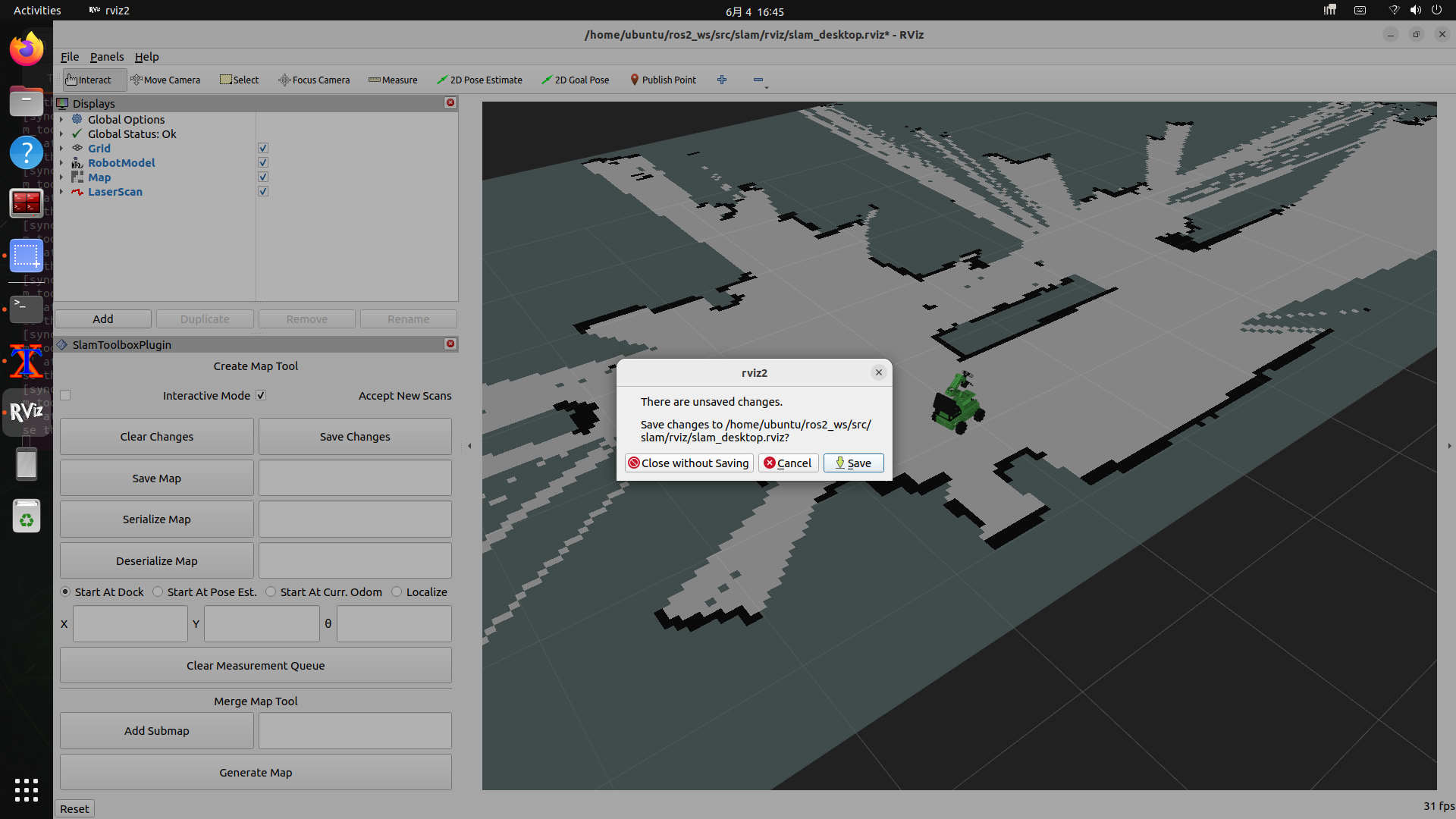
建议:退出 SLAM 时保留远程遥控器程序窗口以便后续导航过程中进行人工干预。
5. 自主导航(Nav2)流程
在完成并加载地图后,使用 Navigation 程序启动 Nav2,系统会基于激光雷达实时匹配并定位到已保存地图。
-
双击桌面
Navigation,等待加载地图与相关节点启动。 -
若初始位姿不准,使用工具栏中的
2D Pose Estimate在地图上拖拽设定机器人当前位置与朝向。
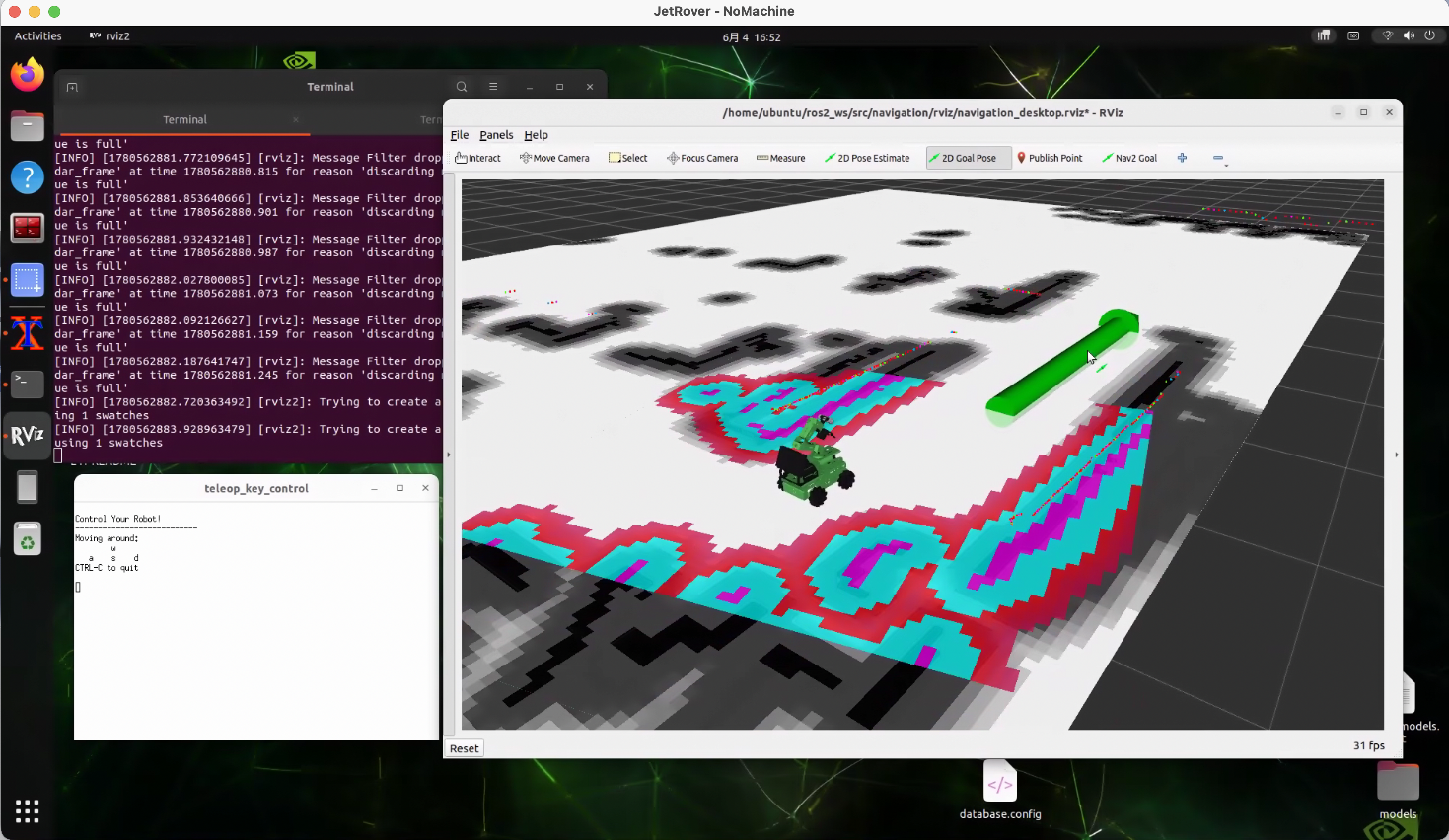
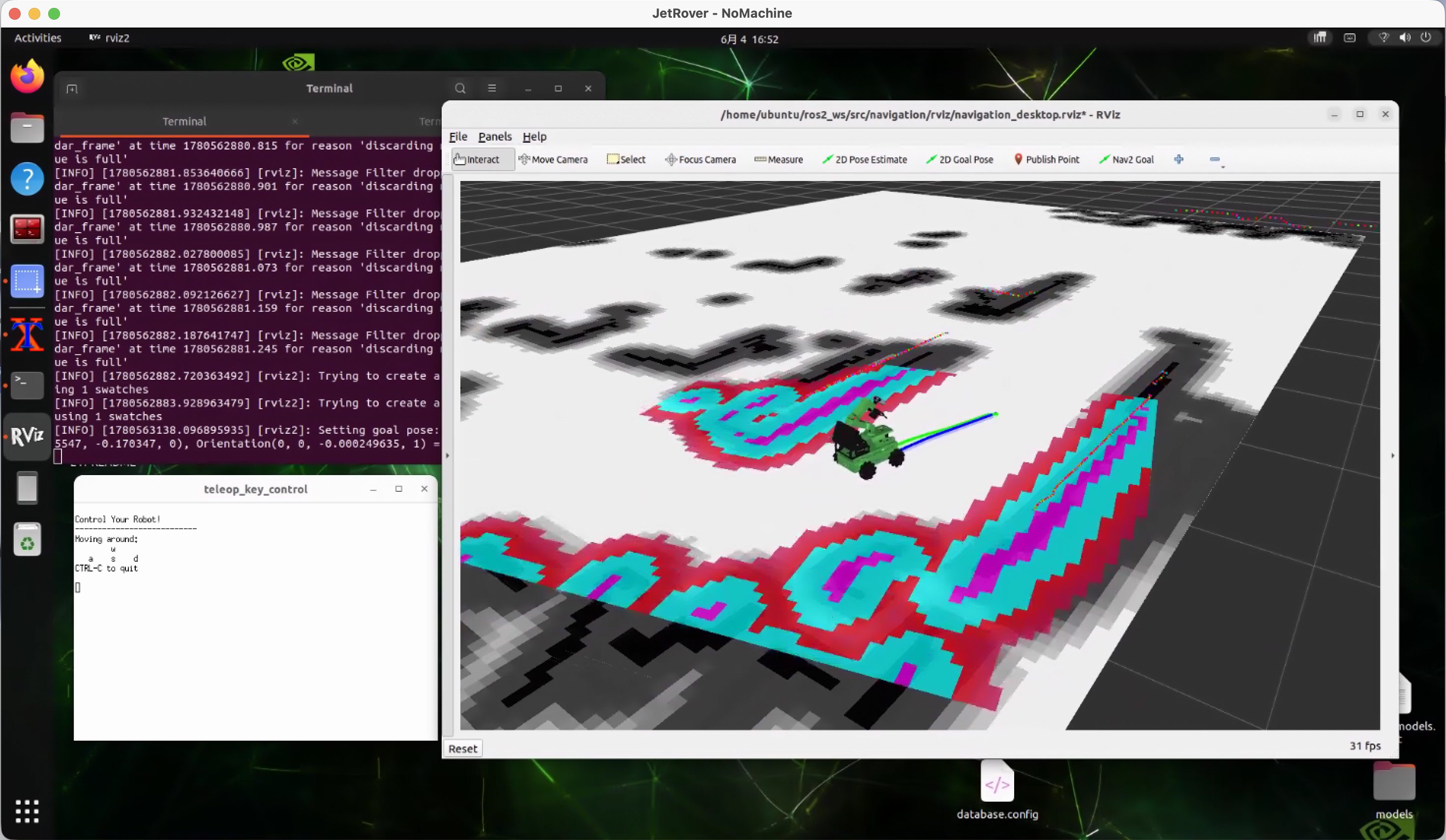
单目标点导航:
- 选择
2D Goal Pose,在地图上点击目标点并拖拽以设定朝向,松开鼠标后 Nav2 将自动规划路径并移动至目标。
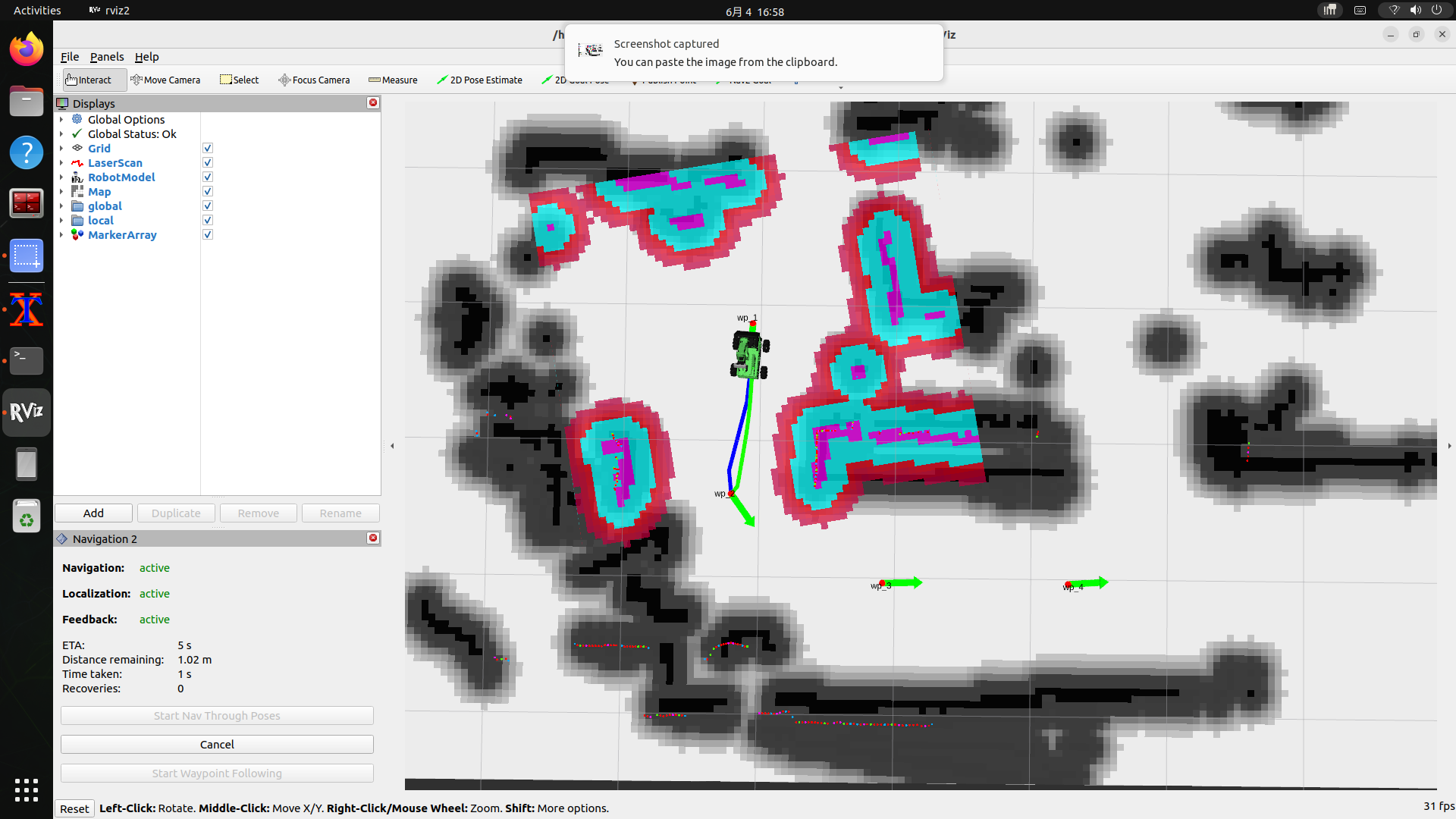
多点路径导航(Waypoint):
- 启用
Waypoint / Nav Through Poses Mode,
每次点击 Nav2 Goal 添加一个路径点,
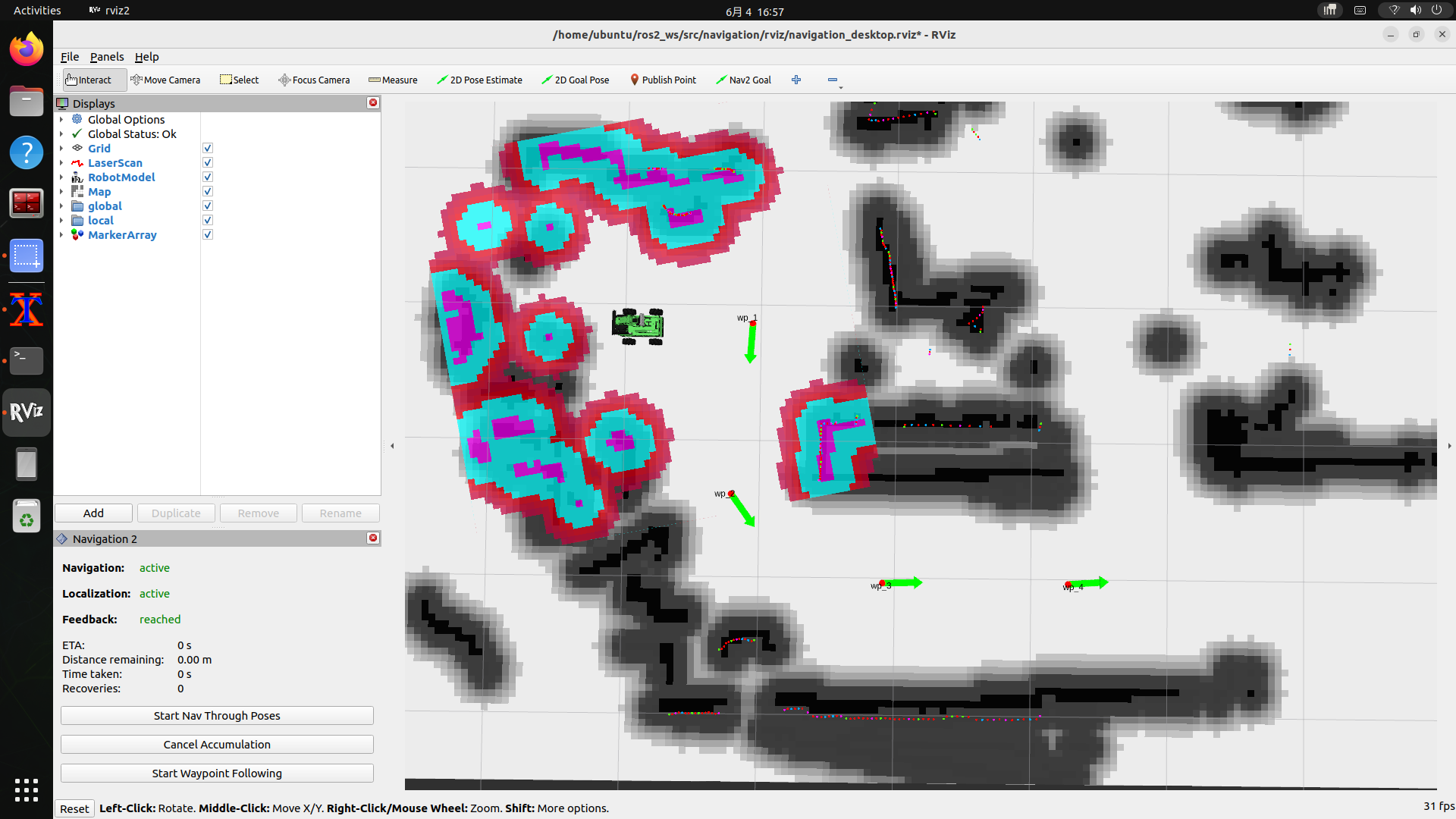
重复设置多个点后点击 Start Nav Through Navigation 开始按序导航。系统将进行路径规划并动态避障。
6. 常见问题与难点
- 在点击SLAM与Navigation图标后,程序自动打开的RViz界面无数据:多数情况是因为雷达或摄像头信息加载失败,需要关闭所有相关程序窗口后重新打开。若多次重启仍然失败,请注意检查3. 启动与工具检查中的配置信息!
- 使用NoMachine连接远程桌面时,时常会出现断连卡顿的情况:可以尝试点击NoMachine界面右上角的
Settings(红色尖头指向的位置),在Display选项中调整分辨率为较低的设置(如 1024x768),将Quality向Best Speed侧滑动,以减少数据传输量并提升稳定性。
- 在Nav2导航过程中,机器人无法正确避障或路径规划失败:可能是因为建图过程中某些区域未被充分扫描导致地图不完整,或是初始位姿设定不准确。建议回到4. 手动建图(SLAM)流程重新进行建图,确保覆盖所有区域,在关键区域缓慢、反复地扫描以提高准确度,并在导航前使用
2D Pose Estimate进行准确的初始位姿设定。